This post is going to introduce you an operating system – RTOS. It includes its definition, main components, types, features and some extra information of RTOS.
Here are various kinds of operating systems such as open system, Zorin OS, Windows Server 2003, Windows XP, Windows NT, Windows 98, Linux, and RTOS, etc. Except RTOS, other systems have been introduced in previous articles of MiniTool.
Today, the focus comes to RTOS. Detailed information like its definition, components, and main features will be introduced in the content below. Now, move on to the following section.
What Is an RTOS
RTOS is short for real-time operating system, which is designed for serving real-time applications. These applications cope with data immediately it comes in. The processing time needs to be calculated in tenth seconds of increments of time in the real time operating system.
The RTOS is a time-bound system that can be defined as fixed time constraints. It means that the processing must be executed within the specified constraints on the real-time operating system. Otherwise, RTOS will fail.
What Consists of RTOS
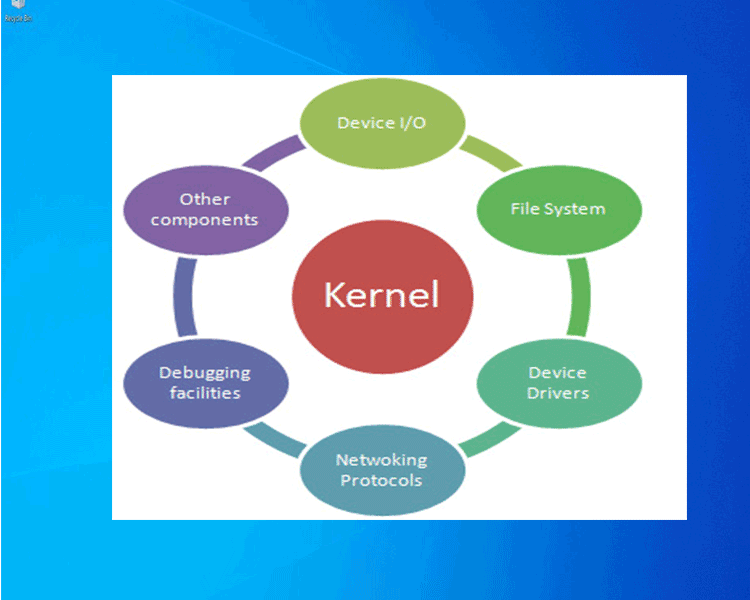
The RTOS is composed of multiple elements. Here are some important components of RTOS.
- Memory Management: This component is required for the system, which is used to allocate memory to every program. Hence, it is regarded as the most component of the RTOS.
- The Scheduler: It tells the place where the tasks can be executed.
- Function Library: It is a vital component of RTOS, which acts as an interface helping you connect kernel and application code. With this application, you can send the requests to the kernel utilizing a function library. Then the application can obtain the expected results.
- Symmetric Multiprocessing (SMP): RTOS can handle multiple different tasks. Hence, parallel processing can be done.
- Fast dispatch latency: Actually, it is can interval between the destination of the task capable of identified by the OS and the actual time cost by thread.
- User-defined data objects and classes: The RTOS uses programming languages like C and C++.
Primary Types of RTOS
The real-time operating system has 3 types. They are Hard Real Time, Firm Real Time, and Soft Real Time.
Hard Real Time
Operating systems that can totally ensure a maximum time for operations like OS calls and interrupt handling usually are called “hard real-time”. In hard RTOS, the deadline is addressed strictly. It means that the given task must begin executing on specified scheduled time and finish within the assigned time.
Firm Real Time
Firm real time RTOS also need to follow the deadlines. Missing the deadline may not have tremendous impact but still could cause undesired affects. For instance, it could result in a huge reduction in quality of the product.
Soft Real Time
Operating systems that can only guarantee a maximum most of the time are referred to as soft real-time. Soft real time RTOS can accept some delays by the operating system. Though there is a deadline for a specific job in the soft real time RTOS, a delay for a small amount of time is acceptable.
Main Features of RTOS
Why use an RTOS? Probably you can get the answer after learning the advantages of RTOS.
- Takes up less memory
- Consumes fewer resources
- Response time is predictable
- Unpredictable environment
In addition to factors above, there are some other elements that persuade you to use RTOS.
Performance: Performance is the most important factor that should be considered while selecting for a RTOS.
Middleware: If there is no middleware support in real time operating system, the issue of time-taken integration of processes occurs.
Error-free: Since RTOS systems are error-free, there is no chance of getting an error while executing the task.
Embedded system usage: Programs of RTOS are small in size. Given to that fact, we recommend RTOS for embedded systems.
Maximum Consumption: With the help of RTOS, we can achieve maximum consumption.
Task shifting: Shifting time of the tasks is very little.
Unique features: A good RTS should be capable, and it has some extra features like how it operates to execute a command, efficient protection of the memory of the system, etc.
Idle processing: Background or idle processing is often performed in the idle task, which can guarantee things like CPU load measurement, background CRC checking will not affect the main processing.
Abstracting Timing Information: The RTOS is responsible for timing. Besides, it provides API functions.
Bottom Line
What is an RTOS? Read here, you may find the answer. In fact, you will have a thorough understanding of RTOS after reading the post.
About The Author

Position: Columnist
Having writing articles about computer tech for a long time, I am rather experienced especially on the aspect of computer optimization, PC enhancement, as well as tech terms explanation. The habit of looking through tech forums makes me a great computer issues collector. And then, many articles related to these issues are released, which benefit plenty of users. Professional, effective, and innovative are always the pursuit of an editing worker.